LED blink using for loop example#
Code#
for : l in 0:10 {
digital_write(P1_31, true);
delay(1000);
digital_write(P1_31, false);
delay(1000);
}
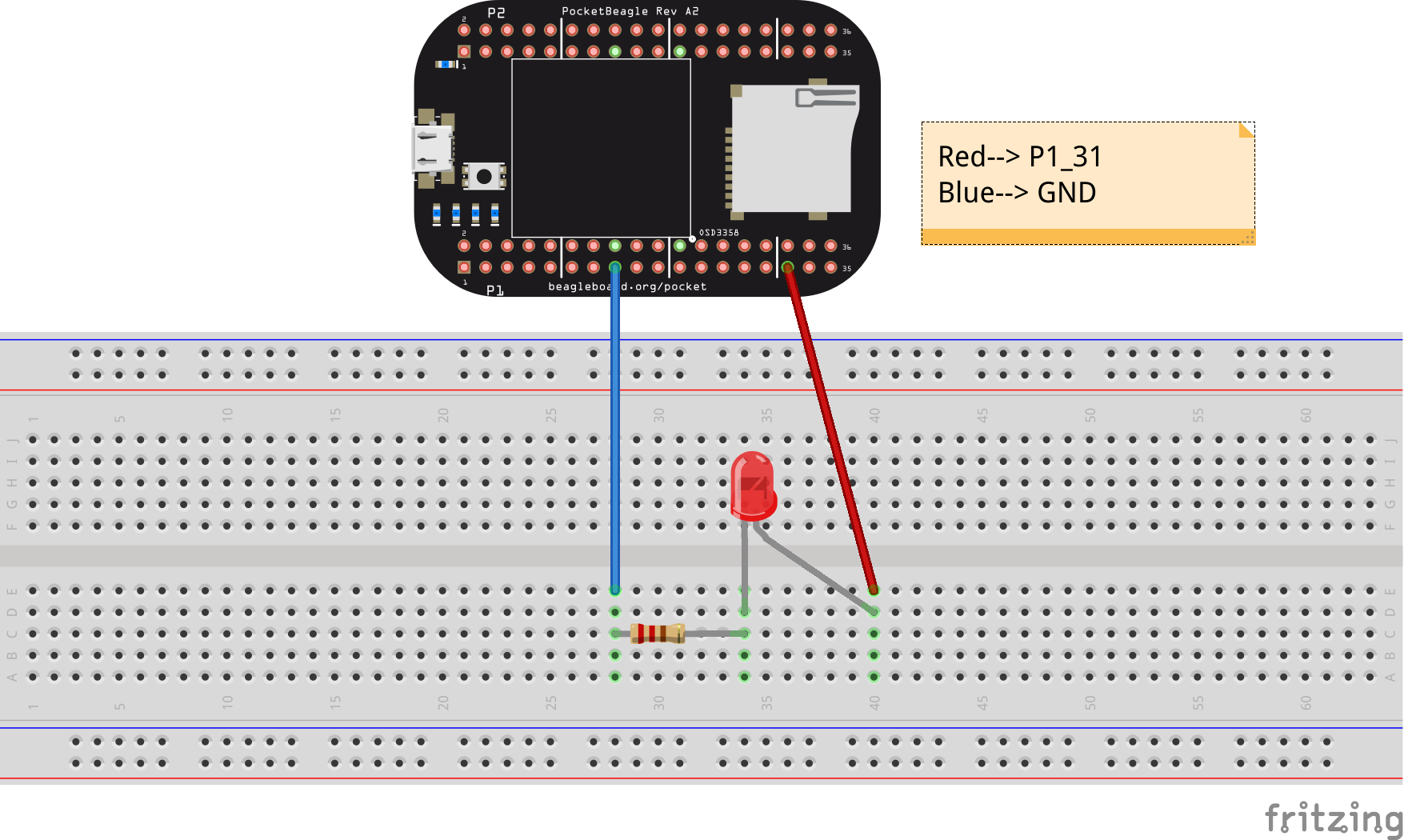
Following code works on PocketBeagle, to use on other boards, please change the pins accordingly.
Explanation#
This code runs for loop with 10 iterations, Inside for it sets
header pin P1_31 to HIGH, waits for 1000ms, then sets header pin P1_31
to LOW, then again it waits for 1000ms. This loop runs endlessly, so we
get a Blinking output if one connects a LED. So LED will blink 10 times
with this code.